

We left off with the Scarlet Space Hawks as they launched their student organization and secured their funding to build their robot. Before the team could travel to NASA’s Kennedy Space Center (KSC) and place third in the mining category of the NASA Robotic Mining Competition (RMC), they needed to build their robot.
The bulk of the fabrication was completed between April and the middle of May. The team utilized many of the fabrication shops on campus to complete their project. They completed basic cuts of metal in the Engineering Student Machine shop under the supervision of Stan Johnson, Armour College of Engineering shop technician. They used the CNC machines in the Advanced Projects Machine shop to fabricate the shafts for their drive motors with the support of Craig Johnson, Armour’s head of machine shop and coordinator of Student Fabrication and Design Studio. The group also utilized the machining equipment in the Illinois Tech Idea Shop to complete the robot.
While working in the shops, the team learned how to use all the tools available to them safely and with the proper techniques. The team also had a “home” in the Grainger Lab in the Electrical and Computer Engineering department where they were able to work on the robot in their free time. As the competition loomed on the horizon, many members spent several late nights in the lab to ensure that their robot could be fielded to compete.
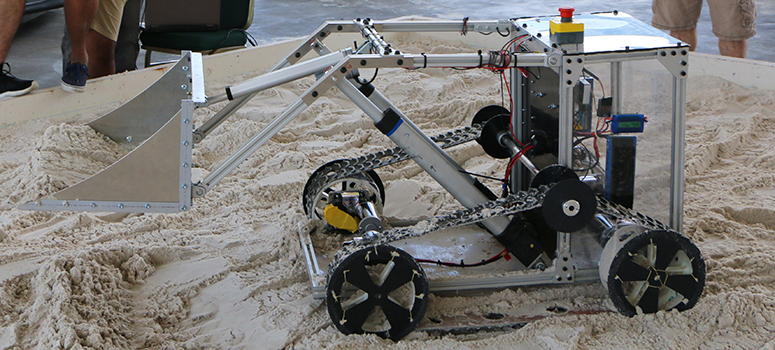
2017 Scarlet Space Hawk’s NASA RMC Robot
On May 22, the team arrived at NASA’s KSC and would spend the first two days attending the introduction ceremony, having their robot and communications systems inspected, and practicing the operation of their robot. The team was allowed one practice run in the competition arena and multiple runs in a smaller practice arena that was visible to the public visiting the KSC Visitors Center.
On May 25 the team made their first official run. To complete their attempt successfully, the robot had to navigate the simulated Martian landscape that comprised the arena, collect regolith, and deposit it into a receptacle. To add to the difficulty and to simulate the experience of operating a robot on a different planet, the team was required to use cameras and tele-operate their robot via a control room that is separate from the competition arena.
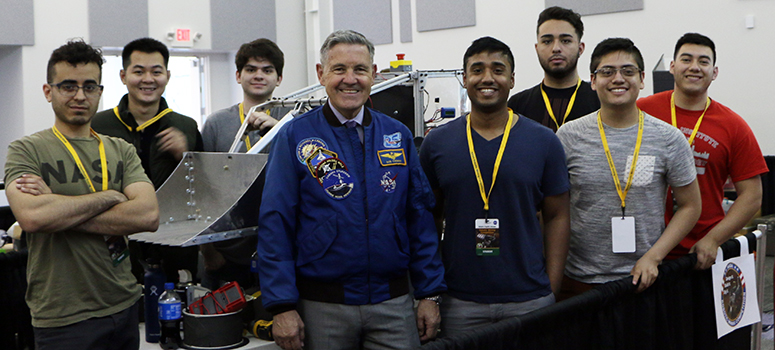
After successfully completing their first run the group and their robot had another chance to prove their might the next morning. Although less successful than the first, the team collected enough regolith during the run to be a contender. After their second run, the team had a special guest drop by their work area, Director of NASA’s KSC Robert Cabana. The director noted how impressive it was that a first year team was performing so well. The team even had a chance to demonstrate their robot for him and take a group photo.
Scarlet Space Hawks with Director of NASA’s KSC, Robert Cabana
The team members who made the trip to KSC included Pedro Morales (EE 4th year), team president and electrical team; Shawn Zachariah (EE 4th year), team president and electrical team; Alex Messina (EE 4th year), electrical lead; Jigar Mistry (ME 4th year), mechanical lead; Hieu Nguyen (EE 4th year), lead programmer; Kyle Turner (CS 5th year), autonomy lead; Michael Duncan (AE ‘17), mechanical team; Victor Paz (CS 4th year), programming team; Adrian Rivera (CPE 4th year), electrical team; and Andre Vega (CS 5th year), autonomy team.
Members of each team learned specialized skills that will help prepare them in their future careers. Mechanical team members learned how to design parts in Inventor and Solidworks that they would later machine and fabricate themselves. The team also ran Finite Element Analysis simulations on their designs to ensure the parts would not fail under stress. Members of the electrical team gained insight on how to design and maintain a power system that would not exceed their battery’s capacity. They also had to design dust proofing measures for the electronics system that met NASA regulations. The autonomy team learned how to design algorithms that would allow the robot to navigate and dig without human assistance.
Although they did not win the overall competition, the team was satisfied with what they accomplished. Next year, the team plans to completely redesign their robot. They feel that they have made the most of their 2017 design and plan to tailor their new robot to the tighter restrictions NASA put on the 2018 competition.
Participating in competitions such as NASA RMC are great opportunities for students to demonstrate their professional experience, ability to work on an interdisciplinary team, and complete a project from the ground up. “I knew that if I wanted the top companies in the aerospace industry to notice me, I needed to undertake projects that demonstrate my ability and willingness to find solutions to complex problems,” shares Zachariah.
View of video of the team’s robot in action
Student-led experiences also allow budding engineers to apply what they have learned in the classroom to a tangible project. “Designing the robot’s power system gave me the perfect opportunity to understand real world applications of D.C circuits and how to come up with the most efficient design,” shares Morales.
The hard work the two transfer students put into organizing the team at Illinois Tech is already paying off. Zachariah was recruited by Northrop Grumman Corporation this summer for an internship. For three months, he worked as a hardware engineering intern in the Mission Systems Headquarters located in Baltimore. Building off his NASA RMC experience he worked on complex robotics-related projects on a much larger scale.
If you are interested in joining the group, please email Shawn Zachariah or Pedro Morales or connect with the team on Facebook.